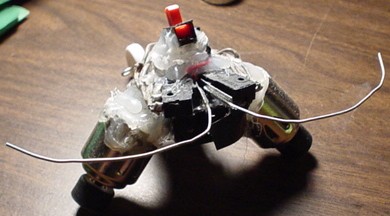
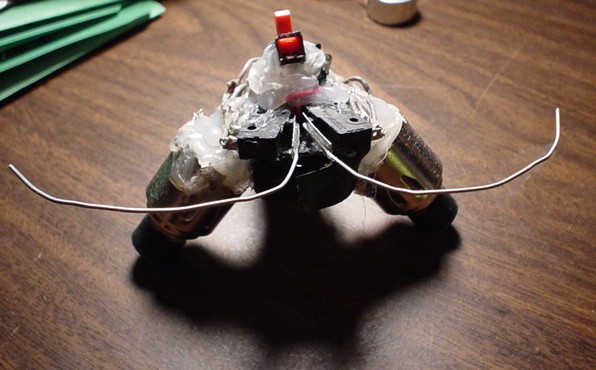
Henry is a simple BEAM robot that has obstacle avoiding capabilities. Henry detects obstacles via two tactile sensors mounted in the front. The tactile sensors consist of a paper clip that is epoxied to a normally open lever switch. He is powered by two AAA's who's holder makes up the primary structural component of his body. The tutorial used to crate him can be found at:. I have created a newer version of Henry that I call Sebastian. The tutorial to build him can be found here.


(click an image for a larger version)